Статья опубликована в рамках: XXXIX Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 22 октября 2014 г.)
Наука: Технические науки
Секция: Аэрокосмическая техника и технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
О РЕШЕНИИ ЗАДАЧ БОРТОВОГО ДИАГНОСТИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ С ПОМОЩЬЮ РЕКОНФИГУРИРУЕМЫХ ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ
Савкин Леонид Васильевич
аспирант ФГУП «НПО им. С.А. Лавочкина», начальник бюро Филиала ФГУП «НПО им. С.А. Лавочкина», РФ, г. Калуга
E -mail: android4.1@mail.ru
ABOUT THE SOLUTION OF TASKS OF ONBOARD DIAGNOSING OF SPACECRAFTS BY MEANS OF RECONFIGURABLE COMPUTING SYSTEMS
Leonid Savkin
graduate student, chief of bureau, The Branch of Federal Enterprise “Lavochkin Association”, Russia, Kaluga
АННОТАЦИЯ
Предложен способ повышения эффективности диагностического обеспечения бортовой аппаратуры космических аппаратов с помощью реконфигурируемых вычислительных систем. Процедуру диагностики бортовых систем предлагается рассматривать в виде решения задач графоаналитическими методами. Приведен пример распределения ресурсов реконфигурируемого вычислительного поля для решения задач диагностики бортовых систем.
ABSTRACT
The method of increase of efficiency of diagnostic support of onboard equipment spacecraft’s by means of reconfigurable computing systems is offered. Diagnostics of onboard systems is offered to be considered in the form of the solution of tasks by graphic-analytical methods. The example of distribution of resources a reconfigurable computing field for the solution of tasks of diagnostics of onboard systems is given.
Ключевые слова: диагностика; реконфигурация; программируемая логическая интегральная схема (ПЛИС).
Keywords: diagnostics; reconfiguration; programmable logic device (PLD).
Непрерывное совершенствование служебной и целевой бортовой аппаратуры современных космических аппаратов (КА) как в отношении надежности, так и в отношении общего числа решаемых задач, требует и соответствующего усложнения их аппаратно-программного построения.
Благодаря стремительному развитию радиационностойкой высокоинтегрированной электронной компонентной базы (ЭКБ), рост объема функциональных задач, решаемых служебной и целевой аппаратурой КА, успешно сочетается сегодня с параллельной тенденцией к минимизации габаритно-массовых параметров, предъявляемых к данным типам аппаратуры.
В соответствии с наблюдаемым ростом сложности аппаратно-программного построения функциональной электронной аппаратуры бортовых систем, совершенствуются методы и средства проведения бортового диагностирования служебной и целевой аппаратуры эксплуатируемых КА. Данная задача важна не только с точки зрения выяснения причин, приведших к возникновению неисправности или отказа той или иной бортовой системы КА раньше установленного срока его активного существования. Ее актуальность заключается, в первую очередь, в необходимости повышения эффективности методов контроля и диагностики технического состояния эксплуатируемого КА с целью своевременной и максимально точной локализации неисправностей с возможностью их последующего устранения или изолирования, что является важнейшей составляющей обеспечения безотказного функционирования систем КА и его надежности в целом. Кроме того, знание причин, приведших к возникновению неисправности в бортовой аппаратуре и условий, благоприятствующих их появлению, позволит не допустить их появление вновь или хотя бы снизить их число в последующих разработках новых КА.
Не смотря на то, что вычислительные ресурсы бортовых цифровых вычислительных машин (БЦВМ) обеспечивают решение всех известных на сегодняшний день функциональных задач, стоящих перед современными КА с определенными технологическими запасами по памяти и быстродействию, некоторые сбои и неисправности, возникающие в служебной и целевой аппаратуре КА, не всегда удается локализовать с высокой степенью точности.
Сложные типы ЭКБ аппаратуры КА, такие как центральные процессоры (ЦП), микроконтроллеры (МК), программируемые логические интегральные схемы (ПЛИС), при возникновении в них неисправностей, очень часто не выходят из строя полностью, а продолжают работать некорректно. Бортовая система контроля и диагностики (СКД) после фиксации неисправности или отказа производит переключение неисправной подсистемы на резервную. При этом, не редко, остается так и невыясненной точная причина неисправности тех же ЦП, МК или ПЛИС на периферийных участках, не говоря уже об уровнях аппаратного ядра, памяти и элементов низкого аппаратного уровня (логические вентили, триггеры, коммутаторы).
Данную проблему можно рассматривать в двух аспектах. Первый аспект связан с недостаточным уровнем контролепригодности бортовых средств, что должно учитываться еще на начальных этапах проектирования аппаратуры КА. Второй аспект заключается в несовершенстве диагностических моделей штатного диагностического обеспечения СКД КА, что связано с недостаточной гибкостью и невозможностью адаптации алгоритмов диагностики к аппаратным и программным неисправностям сложного вида, возникающим в условиях внешних воздействующих факторов (ВВФ), характерных условиям эксплуатации КА.
Необходимость в высокой степени локализации отказавшего элемента может потребовать кардинального перестроения диагностической модели СКД, что, как показывает многочисленная практика, не всегда удается реализовать из-за недостаточной гибкости и невозможности глубокой реконфигурации штатных диагностических алгоритмов.
Кроме того, в процессе диагностирования бортовой аппаратуры, для более качественной оценки ее технического состояния, может потребоваться ввести новый функциональный элемент или аппаратное устройство, которое не предусмотрено составом бортовой аппаратуры.
Данные проблемы предлагается решать, используя диагностическое обеспечение КА, построенное на базе реконфигурируемых вычислительных систем (РВС).
РВС являются сегодня одним из успешно развивающихся направлений в области создания суперкомпьютеров и позволяют решать широкий спектр трудоемких вычислительных задач с высокой производительностью, которая значительно превышает производительность ЭВМ с постоянной архитектурой.
Здесь необходимо отметить работы таких отечественных исследователей, как А.В. Каляев [6], Э.В. Евреинов [4; 5], И.В. Прангишвили [8] и В.Г. Хорошевский [5], которые заложили многие фундаментальные принципы для формирования концепции РВС и позволили ей успешно развиваться во многих научных и прикладных областях по сегодняшний день.
Наиболее распространенные типы РВС строятся на базе ПЛИС, которые, в свою очередь, являются сложной высокоинтегрированной микросхемой, способной менять свою внутреннюю структуру в зависимости от программы. Управление соединениями в ПЛИС осуществляется с помощью низкоуровневых языков описания аппаратуры (Hardware Description Language, HDL), основными представителями которых являются языки VHDL и Verilog.
ПЛИС, как правило, состоит из матричной структуры, элементами которой являются коммутируемые логические блоки (КЛБ). Матричная структура обеспечивает возможность распределения вычислений в виде графа, топология которого соответствует информационной структуре решаемой задачи и соответствующим образом «накладывается» на реконфигурируемое вычислительное поле.
Ключевой особенностью РВС является возможность топологической адаптации своей архитектуры к информационной структуре решаемой вычислительной задачи. Это, в свою очередь, наделяет свойством гибкости алгоритмы вычислений при изменении условий задачи или уточнении ее параметров (значения исходных данных, значения коэффициентов, типы связей между переменными и т. д.). Данное свойство и предлагается использовать в диагностическом обеспечении бортовых систем КА, представляя при этом любой диагностический алгоритм в виде графа ![]() (рисунок 1).
(рисунок 1).
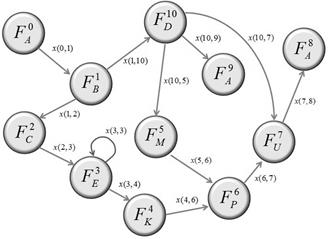
Рисунок 1. Представление задач диагностики в виде графа
Вершинами данного графа являются базовые функциональные блоки ![]() , реализуемые посредством КЛБ, где
, реализуемые посредством КЛБ, где ![]() — порядковый номер КЛБ-вершины, а
— порядковый номер КЛБ-вершины, а ![]() — базовая арифметико-логическая функция, многократно перестраиваемая за счет программы и зависящая от характеристик КЛБ, т. е. используемого типа ПЛИС.
— базовая арифметико-логическая функция, многократно перестраиваемая за счет программы и зависящая от характеристик КЛБ, т. е. используемого типа ПЛИС.
Дуга ![]() определяет направление и последовательность вычислительных операций внутри графа, или, иными словами, определяет алгоритм вычислений на основе базовых арифметико-логических функций реконфигурируемого вычислительного поля ПЛИС.
определяет направление и последовательность вычислительных операций внутри графа, или, иными словами, определяет алгоритм вычислений на основе базовых арифметико-логических функций реконфигурируемого вычислительного поля ПЛИС.
Характеристики функционального ресурса диагностического обеспечения в этом случае будут определяться в основном площадью реконфигурируемого вычислительного поля, а также функциональными и коммутационными возможностями КЛБ, что будет зависеть опять же от параметров выбранной ПЛИС.
Помимо вышесказанного, использование РВС позволит осуществлять проведение диагностики некоторых элементов бортовых систем КА методом дублирования, создавая при этом дублирующие элементы непосредственно в СКД.
На рисунке 2 показан пример реализации диагностического алгоритма методом дублирования с помощью базовых логических элементов: «Исключающее ИЛИ» и «ИЛИ».
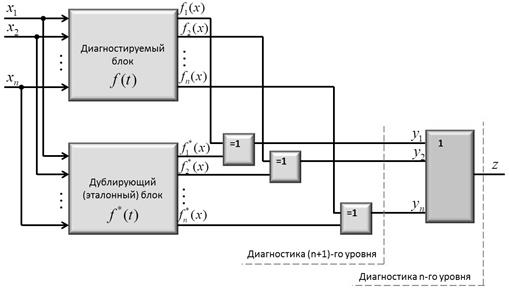
Рисунок 2. К принципу диагностики методом дублирования
Диагностика блока, нормальное функционирование которого описывается набором функций ![]() , осуществляется с помощью дублирующего (эталонного) блока, характеристики которого аналогичны диагностируемому и описываются набором функций
, осуществляется с помощью дублирующего (эталонного) блока, характеристики которого аналогичны диагностируемому и описываются набором функций ![]() , где
, где ![]() — номер канала тестирования.
— номер канала тестирования.
При подаче на входы диагностируемого и дублирующего блока тестовый сигнал ![]() , на выходе диагностируемого блока, при его исправном состоянии ожидается получение тех же откликов, что и в дублирующем, т. е.
, на выходе диагностируемого блока, при его исправном состоянии ожидается получение тех же откликов, что и в дублирующем, т. е.
![]() .
.
С помощью логических элементов «Исключающее ИЛИ» реализуется операция сложения по модулю два функций откликов диагностируемого и дублирующего блока, т. е.
![]() ,
,
где ![]() — выходное значение сигнала на
— выходное значение сигнала на ![]() -ом элементе «Исключающее ИЛИ».
-ом элементе «Исключающее ИЛИ».
В случае поступления на вход логического элемента «Исключающее ИЛИ» разных функций от диагностируемого и дублирующего блоков, т. е.
![]() ,
,
на его выходе сформируется логическая единица, что будет свидетельствовать от неисправности диагностируемого блока на его ![]() - ом диагностическом уровне.
- ом диагностическом уровне.
Здесь на логическом элементе «ИЛИ» реализуется функция общей оценки состояния ![]() диагностируемого блока
диагностируемого блока ![]() , которая может принимать только два значения: «0» или «1». Состояние диагностируемого блока можно описать с помощью функции
, которая может принимать только два значения: «0» или «1». Состояние диагностируемого блока можно описать с помощью функции ![]() следующим образом:
следующим образом:
![]()
где ![]() - сигналы на выходах логических элементов «Исключающее ИЛИ» в каждом из каналов тестирования.
- сигналы на выходах логических элементов «Исключающее ИЛИ» в каждом из каналов тестирования.
Показанный пример иллюстрирует проявление двух уровней диагностики следующим образом.
Первый диагностический уровень достигается с помощью функции ![]() , показывающей нам общее состояние диагностируемой системы, т. е. сам факт наличия или отсутствия в ней неисправностей. Повышение же диагностического уровня на единицу позволяет нам локализовать неисправность до конкретного функционального участка (
, показывающей нам общее состояние диагностируемой системы, т. е. сам факт наличия или отсутствия в ней неисправностей. Повышение же диагностического уровня на единицу позволяет нам локализовать неисправность до конкретного функционального участка (![]() -го канала) диагностируемого блока.
-го канала) диагностируемого блока.
Самым важным свойством РВС, применительно к данному примеру, является то, что дублирующий блок со всеми его функциями, не говоря уже о логических элементах «Исключающее ИЛИ» и «ИЛИ», мы можем реализовать с помощью одной только РВС непосредственно в бортовой СКД.
На рисунке 3 показан пример условного распределения реконфигурируемого вычислительного поля на три части для СКД, реализуемой посредством РВС.
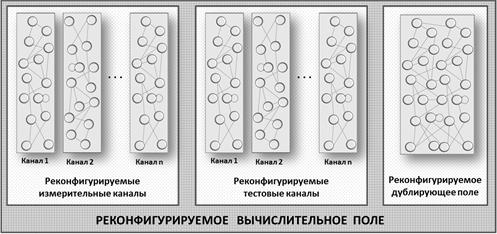
Рисунок 3. Распределение диагностических задач в реконфигурируемом вычислительном поле
Первая часть отведена для измерительных каналов, каждый из которых требует самостоятельного алгоритма опроса контрольных точек диагностируемой бортовой аппаратуры.
Во второй части поля формируются независимые тестовые сигналы, посредством которых осуществляется тестирование и проверка функционирования служебной и целевой аппаратуры КА.
Третья часть представляет собой реконфигурируемое дублирующее поле, за счет которого можно формировать необходимые аппаратные устройства для дублирования, а значит, и восстанавливать некоторые вышедшие из строя элементы аппаратуры КА. Безусловно, данные возможности реконфигурируемой СКД должны определяться еще и уровнем контролепригодности диагностируемой аппаратуры.
Т. о., каждый из участков реконфигурируемого вычислительного поля может кардинальным образом менять свою конфигурацию, меняя, тем самым, диагностические модели СКД и являясь, в свою очередь, мощным вычислительным инструментом, предназначенным для поиска неисправностей с высокой степенью точности в бортовой аппаратуре КА.
Выводы:
1. Диагностическое обеспечение, построенное на базе РВС, позволяет перестраивать и создавать новые диагностические модели, используя один и тот же вычислительный ресурс СКД;
2. 2)РВС позволяют осуществлять диагностику сложных элементов бортовых систем КА методом дублирования, создавая необходимую дублирующую аппаратуру непосредственно на борту КА.
3. 3)Свойства РВС в диагностическом обеспечении КА можно использовать для восстановления отдельных элементов бортовой аппаратуры, если это заранее предусматривать в аппаратно-программном построении функциональной части бортовых систем.
Список литературы:
1.Алексеев А.А., Кораблев Ю.А., Шестопалов М.Ю. Идентификация и диагностика систем. М.: Издательский центр «Академия», 2009. — 352 с.
2.Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. и др. Бортовые системы управления космическими аппаратами. /Под ред. проф. А.С. Сырова М.: Изд-во МАИ-ПРИНТ, 2010. — 304 с.
3.Глущенко П.В. Техническая диагностика: Моделирование в диагностировании и прогнозировании состояния технических объектов. М.: Вузовская книга, 2004. — 248 с.
4.Евреинов Э.В. Однородные вычислительные системы, структуры и среды. М.: Радио и связь, 1981. — 208 с.
5.Евреинов Э.В., Хорошевский В.Г. Однородные вычислительные системы. Новосибирск: Наука, 1978.
6.Каляев А.В. Многопроцессорные системы с программируемой архитектурой. М.: Радио и связь, 1984, — 240 с.
7.Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые мультиконвейерные вычислительные структуры /Изд. 2-е, перераб. и доп. / Под общ. Ред. И.А. Каляева. Ростов-н/Д.: Изд-во ЮНЦ РАН, 2009. — 344 с.
8.Прангишвили И.В., Абрамова Н.А., Бабичева Б.В., Игнатущенко В.В. Микроэлектроника и однородные структуры для построения логических и вычислительных устройств. М.: Наука, 1967. — 228 с.
дипломов