Статья опубликована в рамках: XXVII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 30 октября 2013 г.)
Наука: Технические науки
Секция: Машиностроение и машиноведение
Скачать книгу(-и): Сборник статей конференции, Сборник статей конференции часть II
- Условия публикаций
- Все статьи конференции
дипломов

ОБ ОСОБЕННОСТЯХ РАБОТЫ БЛОКА УПРАВЛЯЕМЫХ ДЕБАЛАНСНЫХ ВИБРОВОЗБУДИТЕЛЕЙ
Черевко Александр Николаевич
канд. техн. наук, зав. кафедрой теоретической механики, доцент Полтавского национального технического университета, г. Полтава
E-mail:
ABOUT FEATURES OF THE BLOCK OF CONTROLLED ECCENTRIC WEIGHT VIBRATION EXCITERS
Alexandr Cherevko
candidate of Science, Head of Theoretical Mechanics department, assistant professor of Poltava National Technical University, Poltava
АННОТАЦИЯ
Рассматриваются вопросы связанные с динамикой блока управляемых двудебалансных вибровозбудителей. Для оценки возможностей такого генератора колебаний используется теория приведения системы сил к заданному центру. В результате проведенных исследований были получены характеристики вибрационных полей, которые может создавать этот блок, а также зависимость их структуры от угла поворота подвижного дебаланса и угла сдвига фаз.
ABSTRACT
The questions related to the dynamics of the two-block controlled unbalance vibration exciters. To assess the capabilities of the generator vibration theory is used to bring the system of forces to a given center. The studies were obtained characteristics of vibration fields that may cause this unit as well as the dependence of their structure on the angle of rotation of the movable eccentric weight and phase angle.
Ключевые слова: дебаланс; вибровозбудитель, силовое поле, блок, фаза колебаний, управление, сила инерции.
Keywords: eccentric weight, vibration exciter, the force field, block, phase of the oscillation, control, inertial force.
Дебалансний вибровозбудитель — это устройство (механизм), которое состоит из неуравновешенного тела (дебаланса) , закрепленного неподвижно на валу, который вращается в подшипниках. Вращение дебалансного вала происходит при помощи привода, простейшим среди которых является электрический двигатель.
Создаваемая дебалансом возмущающая сила (центробежная сила инерции дебаланса) передается на корпус вибровозбудителя через подшипники.
Благодаря своей простоте, дебалансные вибровозбудители наиболее распространены в технологических вибрационных машинах [1].
Можно выделить два основных мотива зарождения идеи управляемого вибровозбудителя дебалансного типа. Первый состоял в желании облегчить пуск приводного двигателя и исключить неуправляемый переход через промежуточные резонансы. Второй предусматривал возможность менять на ходу независимо амплитуду и частоту колебаний, то есть руководить технологическими характеристиками вибрационного процесса. Первый из них - более простой и очевидный. Можно было бы ожидать, что и хронологически он стал первым. Но в действительности оказалось наоборот.
Развитие происходило по двумя параллельными направлениями:
1. создание технологических вибрационных машин;
2. создание вибрационных испытательных стендов для исследования наиболее ответственных конструкций, приборов и устройств во время их динамических нагрузок.
По понятной причине второе направление было приоритетным, что и обусловило мотивацию развития идеи управляемого возбудителя колебаний.
Несмотря на воображаемое разнообразие технических решений по данной проблеме, их можно условно классифицировать по нескольким основным признакам:
I. Степень регулирования:
1) без регулирования или с регулированием после остановки;
2) с регулированием силами инерции (самоустанавливаемые);
3) управляемые по заданному закону.
II. Характер регулирования:
1) плавное изменение массы и положения дебалансов;
2) ступенчатое изменение массы и положения дебалансов.
III. Вид неуравновешенности:
1) изменение только статического момента массы дебалансов;
2) изменение статического момента и центробежного момента инерции массы дебалансов;
3) изменение статического момента, центробежного и осевого моментов инерции массы дебалансов.
IV. Конструктивные особенности регулирования:
1) изменение массы дебаланса за счет перемещения вдоль его радиуса любой дополнительной массы (ползун, дробь, жидкость);
2) поворот одного дебаланса относительно другого без перемещения вдоль вала;
3) поворот дебаланса с одновременным перемещением его вдоль вала.
Самый большой интерес вызывают вибровозбудители, которые позволяют на ходу плавно управлять характеристиками неуравновешенности по заданному закону. Анализируя их конструктивные особенности, заметим, что практически все они базируются на использовании полого дебалансного вала, внутри которого размещен второй вал или другое устройство для управления дебалансами. Полый вал довольно привлекателен для реализации этой технической идеи, но его применение связано с целым рядом трудностей при конструировании механизма. Скорее всего, это одна из главных причин отсутствия не только серийных технологических машин с управляемым дебалансным вибровозбудителем, но и каких-либо удачных единичных экземпляров.
Отдельные попытки изготовления и применение управляемых вибровозбудителей как привода технологических машин оказались неудачными через несовершенство их конструкций, низкую надежность, сложность управления. Вместе с тем, эти попытки позволили проверить в практическом применении идею управляемого вибровозбудителя, подтвердить ее позитивизм и подчеркнуть целесообразность поисков новых технических решений.
Первый управляемый дебалансний вибровозбудитель для технологических вибрационных машин был разработан в 1985 году в Полтавском инженерно-строительном институте (сейчас Полтавский национальный технический университет им. Юрия Кондратюка) вместе с производственным объединением «Знамя» [2].
Этот вибровозбудитель УВВ-02 (рис. 1) имел два дебаланса. Один из них 4 был неподвижно закреплен на дебалансном валу 3, а второй, подвижный, дебаланс 5 был связан с дебалансным валом с помощью шаровых шпонок 6 и винтовых канавок 7 кругового сечения. Механизм управления состоял из ходового винта 13, маховичка 14 и вилки 10. Подвижный дебаланс соединен с вилкой с помощью подшипников 9. Во время вращения маховичка 14 ходовой винт 13 вместе с вилкой 10 перемешивается вдоль дебалансного вала и тянет подвижный дебаланс 5. Поскольку подвижный дебаланс соединен с дебалансним валом с помощью шаровых шпонок и винтовых канавок, то во время перемещения вдоль вала он будет поворачиваться относительно недвижимого дебаланса на угол 0 от уравновешенного положения. Форма и массы обеих дебалансов одинаковые, в уравновешенном положении они размещены диаметрально противоположно. Статический момент масс равняется нулю. В таком состоянии происходит пуск вибровозбудителя. Части, которые вращаются, статически уравновешенные. Колебания отсутствуют, резонансные частоты во время разгона вибровозбудитель проходит без каких-либо проблем.
После выхода приводного двигателя в режим можно управлять положением подвижного дебаланса изменяя статический момент массы дебалансов от нуля до заданной величины по любому закону. Маховичок управления можно вращать вручную или с помощью дополнительного двигателя.
Перед остановкой вибровозбудителя его части, которые вращаются, снова приводятся в статически уравновешенное состояние. И снова переход через частоты промежуточных резонансов вибровозбудитель проходит плавно, не замечая этих резонансов и не создавая негативных последствий для себя и машины, на которой он установлен.
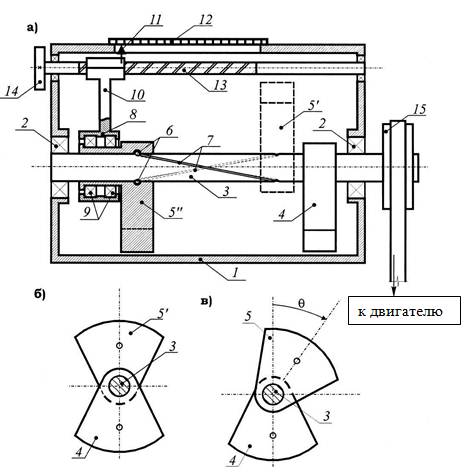
Рисунок 1 Управляемый вибровозбудитель УВВ-02: а — схема вибровозбудителя; б — положение дебалансов во время пуска и остановки; в — положение дебалансов в переходном режиме, 1 — корпус; 2 — подшипники дебалансного вала; 3 — дебалансный вал; 4 — недвижимый дебаланс; 5 — подвижный дебаланс (5´— в положении равновесия); 6 — шаровые шпонки; 7 — винтовые канавки; 8 — втулка; 9 — подшипники; 10 — стойка вилки управления;11 — показатель; 12 — шкала; 13 — ходовой винт; 14 — маховичок; 15 — шкив
Большой интерес представляет собой соединение вибровозбудителей с различными динамическими характеристиками в один вибрационный блок. Рассмотрим работу двух вибровозбудителей с двумя дебалансами на валу. Не изменяя конструктивной схемы машины, будем изменять динамические параметры силового вибрационного поля направлением винтовой канавки на дебалансном валу.
В рассматриваемой ниже схеме вибровозбудители синхронизируются с вращением в противоположные стороны. Расчетная схема (рис. 2) учитывает возможность установки первоначального угла сдвига фаз ![]() . Разворот подвижных дебалансов производится в противоположные стороны, смотря навстречу оси
. Разворот подвижных дебалансов производится в противоположные стороны, смотря навстречу оси ![]() .
.
Для определения возможностей блока вибровозбудителуй приведем систему сил инерции к простейшему виду.
Определим главный вектор сил инерции ![]() :
:
![]() .
.
Проекции главного вектора на оси координат определяются по следующим формулам:
![]() ;
; ![]()
![]() .
.
Рисунок 2 Расчетная схема блока вибровозбудителей
![]() ;
;


![]() .
.
Определим главный момент сил инерции ![]() .
.
![]() ;
;
где: ![]() ;
; ![]() ;
; ![]() .
.



![]()

Определим наименьший главный момент системы сил инерции:
 .
.

Таким образом, система сил приводится к равнодействующей, приложенной в новом центре приведения.
 ;
;
Найдем уравнение линии действия равнодействующей.
![]() .
.
![]() .
.
![]() .
.
Исследуем возможность приведения системы сил к паре сил. Это произойдет в случае равенства нулю главного вектора системы сил:
 ;
;
Для выполнения этого равенства необходимо чтобы:
а) ![]() ;
; ![]() ;
; ![]() . В этом случае пара сил инерции характеризуется моментом:
. В этом случае пара сил инерции характеризуется моментом: 
б)  ;
; ![]() . Рассмотрим оба случая:
. Рассмотрим оба случая:
1) ![]() ;
; ![]() ; определим момент пары сил:
; определим момент пары сил:

2) ![]() ;
; ![]() ; определим момент пары сил:
; определим момент пары сил:

Выводы.
При изменении угла поворота ![]() подвижных дебалансов в пределах от
подвижных дебалансов в пределах от ![]() до
до ![]() система сил инерции приводится к различным простым видам:
система сил инерции приводится к различным простым видам:
1. ![]() , система сил приводится к паре сил с моментом:
, система сил приводится к паре сил с моментом:
 ;
;
2. ![]() , система сил приводится к равнодействующей,
, система сил приводится к равнодействующей,
 ;
;
3. ![]() , система сил приводится к паре сил с моментом:
, система сил приводится к паре сил с моментом:
4. ![]() , система сил приводится к паре сил с моментом:
, система сил приводится к паре сил с моментом:
Список литературы:
1.Бабичев А.П. Основы вибрационной технологии / А.П. Бабичев, И.А. Бабичев. Ростов-н/Д.: ДГТУ, 1999. — 620 с.
2.Сердюк Л.И. Основы теории, расчет и конструирование управляемых вибрационных машин с дебалансными возбудителями: автореф. дис. докт. техн. наук / Л.И. Сердюк; ХПИ. Харьков, 1991. — 48 с .
дипломов