Статья опубликована в рамках: XXII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 11 июня 2013 г.)
Наука: Технические науки
Секция: Приборостроение, метрология, радиотехника
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ДЕМПФИРОВАНИЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
Нестеров Максим Александрович
магистрант СГТУ имени Гагарина Ю.А., г. Саратов
E-mail:
Наумов Сергей Геннадиевич
канд. техн. наук, доцент СГТУ имени Гагарина Ю.А., г. Саратов
E-mail:
THE DAMPING OF STRAPDOWN INERTIAL NAVIGATION SYSTEM WITH USING THE SATELLITE NAVIGATION SYSTEM
Nesterov Maksim
master student of Gagarin SSTU, Saratov
Naumov Sergey
Candidate of Technical Sciences, Associate Professor of Gagarin SSTU, Saratov
АННОТАЦИЯ
Рассматривается вопрос демпфирования колебаний Шулера бесплатформенной инерциальной навигационной системы в кватернионных алгоритмах с использованием информации от спутниковой навигационной системы GPS. Исследование интегрированной системы проводилось с помощью математического моделирования. Данный способ позволяет демпфировать колебания Шулера в навигационной системе в комплексированном режиме. Углы ориентации определяются в 10—100 раз точнее, координаты в 105—2·105 раз.
ABSTRACT
The damping strapdown inertial navigation system with the quaternion algorithms and GPS data is considered. The research of complexed systems was conducted by mathematical modeling. This method allows to damp the Shuler’s oscillations the navigation system in the complex mode. The orientation angles are defined in 10—100 times more accurate. The coordinates are defined 105—2·105 times more accurate.
Ключевые слова: навигационная система; спутниковая навигационная система.
Keywords: navigation system; damping scheme, satellite navigation system.
В инерциальных навигационных системах (ИНС), применяемых в настоящее время в составе навигационных приборов, для демпфирования колебаний с частотой Шулера в целях сохранения невозмущаемости ИНС при движениях объекта используется информация от источников неинерциальной природы. Внешняя информация может быть полезна не только для уменьшения (или даже уничтожения) возмущений инерциальной системы, получающихся при введении в нее демпфирования, но может служить и для сокращения периода невозмущаемых колебаний системы. Наличие дополнительной внешней информации дает возможность демпфировать колебания в инерциальной системе без введения в нее возмущения и сокращать период собственных колебаний системы, не нарушая свойство невозмущаемости.
Благодаря последнему обстоятельству даже временное использование внешней информации может оказаться весьма полезным, так как за сравнительно короткий промежуток времени можно осуществить демпфирование колебаний, обусловленных начальными ошибками системы.
В данной работе рассматривается вопрос демпфирования шулеровских колебаний бесплатформенной инерциальной навигационной системы [2, 3, 4] в кватернионных параметрах с введением дополнительной информации со спутниковой навигационной системы GPS. Совокупная обработка информации от этих двух измерительных систем производится с применением калмановской фильтрации [1]. Для этого модель объекта наблюдения представлена в следующем виде: ![]() , где W — нормальный случайный процесс с нулевым математическим ожиданием, G — матрица шумовых воздействий, А — матрица эволюции системы, которая воздействует на вектор x, x — вектор состояния объекта, который записывается следующим образом:
, где W — нормальный случайный процесс с нулевым математическим ожиданием, G — матрица шумовых воздействий, А — матрица эволюции системы, которая воздействует на вектор x, x — вектор состояния объекта, который записывается следующим образом:

где: α, β, χ — погрешности определения моделируемой в бортовом компьютере горизонтной системы координат,
![]() — погрешности определения ИНС скоростей объекта,
— погрешности определения ИНС скоростей объекта,
![]() — погрешность вычисления широты,
— погрешность вычисления широты,
![]() — дрейф нулей гироскопов,
— дрейф нулей гироскопов,
![]() — сдвиг нулей акселерометров.
— сдвиг нулей акселерометров.
Применим процедуру оптимальной калмановской фильтрации и запишем в матричной форме следующие выражения: ,  ,
,  где y — вектор наблюдения (с использованием информации от спутниковой навигационной системы), C — матрица измерений, связывающая истинный вектор состояния x и вектор произведенных измерений y, V — белый гауссовский шум измерений с нулевым математическим ожиданием, R — ковариационная матрица.
где y — вектор наблюдения (с использованием информации от спутниковой навигационной системы), C — матрица измерений, связывающая истинный вектор состояния x и вектор произведенных измерений y, V — белый гауссовский шум измерений с нулевым математическим ожиданием, R — ковариационная матрица.
Работоспособность интегрированной системы проводилось с помощью математического моделирования. Для этого отдельно исследовалась автономная работа бесплатформенной навигационной системы кватернионных параметрах без использования информации от спутниковой навигационной системы. Затем исследовалась работа интегрированной системы: бесплатформенная ИНС и GPS с применением фильтра Калмана. Параметры моделирования: время работы — 7000 с, начальное положение — широта 51.5 º, долгота 45.9 º, метод интегрирования — Адамса четвертого порядка, шаг интегрирования 0,05 с, объект движется поступательно, в интервале времени с 1500с по 1520 с возникает ускорение 1 м/с2 в направлении на Север, а потом объект движется со скоростью 20 м/с с 1520 с по 7000 с, в интервале времени с 2500 с по 2520 с возникает ускорение 1 м/с2 в направлении на Восток, а потом объект движется со скоростью 20 м/с с 2520 с по 7000 с, также задается колебания объекта по трем осям со следующими величинами: амплитуда качки 0,1 рад, частота качки 0,2π, 0,1π, 0,04π рад/с по осям рыскания, тангажа и крена соответственно в интервале времени с 1000 с по 7200 с. Датчики первичной информации имеют следующие погрешности: дрейф нулей гироскопа 0.6 º/час, шум 0.3 º/час; сдвиг нулей акселерометров 2·10-4 м/с2, шум 4·10-5 м/с2. Система GPS выдает координаты с точность до метра.
На рис. 1—2 приведены графики моделирование работы автономной ИНС и интегрированной ИНС-GPS с применением калмановской фильтрации. Δψ, Δθ, Δγ — погрешности определения углов ориентации (рыскание, тангаж, крен, соответственно). ΔXζ1, ΔXζ2, ΔXζ3, — погрешности определения координат.

Рисунок 1. Моделирование работы автономной ИНС и интегрированной ИНС-GPS с применением калмановской фильтрации (погрешности углов ориентации)
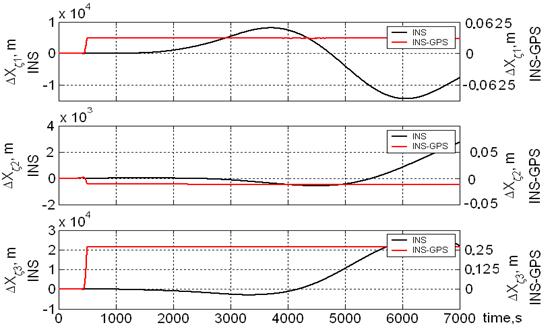
Рисунок 2. Моделирование работы автономной ИНС и интегрированной ИНС-GPS с применением калмановской фильтрации (погрешности координат)
Применение информации от GPS позволяет существенно повысить точность определения ориентационных и навигационных параметров бесплатформенной навигационной системой. Поэтому интегрированный режим ИНС-GPS дает возможность демпфировать шулеровские колебания в ИНС. Однако этот вариант демпфирования возможен только на подвижных объектах, где возможен устойчивый прием сигналов со спутниковых навигационных систем (морские, наземные объекты).
Ориентационные параметры вычисляются в 10—100 раз точнее, навигационные параметры в 105—2·105 раз. Из рис. 1—2 функционирования ИНС в кватернионных параметрах видны колебания с шулеровской частотой. В интегрированной системе эти колебания также заметны, однако их величина значительно меньше. Таким образом, применение информации от источников неинерциальной природы (например, GPS) позволяет в значительной степени повысить точность ИНС с настройкой на шулеровскую частоту, а значит и демпфировать колебания Шулера.
Список литературы:
1.Анучин О.Н. Интегрированные системы ориентации и навигации для морских подвижных объектов / О.Н. Анучин, Г.И. Емельянцев. — СПб.: ЦНИИ «Электроприбор», 2003. — 390 с.
2.Плотников П.К. Элементы теории работы одной разновидности бесплатформенных инерциальных систем ориентации / П.К. Плотников // Гироскопия и навигация. — 1999. — № 3 (26). — С. 23—35.
3.Плотников П.К. Построение и анализ кватернионных дифференциальных уравнений задачи определения ориентации твердого тела с помощью бесплатформенной инерциальной навигационной системы / П.К. Плотников // Изв. РАН Механика твердого тела. — 1999. — № 2 (26). — С. 3—14.
4.Ривкин С.С. Определение параметров ориентации объекта бесплатформенной инерциальной системой / С.С. Ривкин, З.М. Берман, И.М. Окон — СПб.: ЦНИИ Электроприбор, 1996. — 226 с.
дипломов