Статья опубликована в рамках: II Международной научно-практической конференции «Физико-математические науки и информационные технологии: проблемы и тенденции развития» (Россия, г. Новосибирск, 08 мая 2012 г.)
Наука: Информационные технологии
Секция: Системный анализ, управление и обработка информации
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов
АЛГОРИТМ РАСЧЕТА ВИДИМОСТИ ОБЪЕКТОВ НА ПЛАНЕ
Лукоянов Сергей Владимирович
ассистент, ФГБОУ ВПО АГТУ, г. Астрахань
Белов Сергей Валерьевич
канд. техн. наук, доцент, зав. кафедрой Автоматизированные системы обработки информации и управление, ФГБОУ ВПО АГТУ, г. Астрахань
При создании проекта видеонаблюдения все трудности ложатся на плечи человека, который может быть не достаточно квалифицированным специалистом, способного допустить серьезные ошибки. Поэтому остается актуальной разработка системы, способной самостоятельно без участия человека или с минимальным его участием, с учетом огромного множества факторов и требований к установки камер, различного рода рекомендаций, основанных на опыте большого числа экспертов, утвержденных в регламентах министерства внутренних дел РФ. В процессе проектирования системы видео наблюдения, крайне важно учитывать взаимное расположение объектов на плане. Любую поверхность территории можно задать функцией ![]() . Кроме этого любой объект на плоскости можно задать аналогичной функцией. Для каждого типа объекта (элементы природы или ландшафта, а также столб, стена, стол, стул, любой другой искусственный предмет) можно задать шаблон, при котором достигается оптимальная его наблюдаемость
. Кроме этого любой объект на плоскости можно задать аналогичной функцией. Для каждого типа объекта (элементы природы или ландшафта, а также столб, стена, стол, стул, любой другой искусственный предмет) можно задать шаблон, при котором достигается оптимальная его наблюдаемость ![]() с центром в точке
с центром в точке ![]() [1, с. 39—47]. В шаблоне необходимо учитывать:
[1, с. 39—47]. В шаблоне необходимо учитывать:
- если на пути видимости располагается, какой либо предмет с заданным коэффициентом прозрачности, то территория, которую закрывает объект, считается невидимой.
- если объект закрыт другим объектом не полностью, то видимость такого объекта определяется на основе коэффициента допустимого закрытия, заданной экспертно для каждого типа объектов.
- если объем предмета меньше шаблона, заданного для данного предмета, то таким предметом можно пренебречь, т. е. за ним не спрятаться.
Расчеты при проектировании в трехмерной системе координат более точные, но при большом количестве объектов на плане сильно увеличивают время проводимых расчетов, поэтому, если не требуется особая точность целесообразно проводить расчет в двух мерной системе координат [2, 113—118].
Опишем алгоритм расчета относительного закрытия объекта в системе видеонаблюдения.
Его входными параметрами будут:
- объект и координаты его узловых точек;
- точка обзора;
- другие объекты в зоне наблюдения.
Пусть объекты на плане будут заданы сколь угодно сложными многоугольниками.
Тогда V – это объект коэффициент видимости которого необходимо определить. W – это объект или объекты которые закрывают объект V, на который направлен фокус выбранной камеры в данной точке наблюдения.
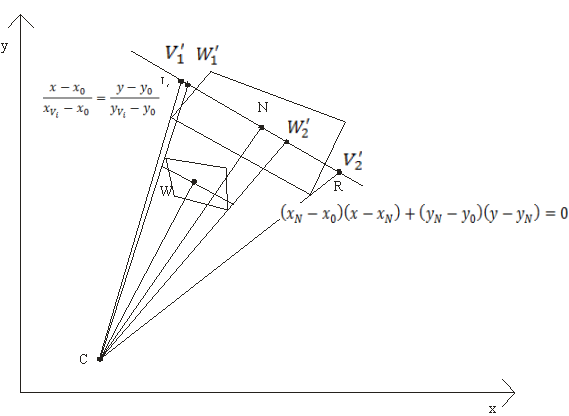
Рисунок 1. Проекция объекта W на прямую р.
Пусть С – это точка расположения камеры, CT – центральная точка объекта.
1. Определение центральной точки наблюдаемого объекта.
Пусть CT – центральная наблюдаемого точка объекта, тогда ее координаты будут находиться по следующим формулам.
![]()

где ![]() =
=![]() ,
, ![]() =
=![]() ,
, ![]() =
=![]() ,
, ![]() =
=![]() .
.
2. Построение проектирующей прямой р, которая проводиться через центральную точку объекта, таким образом, что точка N принадлежит прямой р и линия СN перпендикулярна прямой р. ![]()
3. Нахождение проекции точек объекта на прямую р.
Пусть ![]() – точка объекта, тогда
– точка объекта, тогда ![]() определяется, как точка пересечения прямых
определяется, как точка пересечения прямых ![]() и р.
и р. ![]() , где
, где ![]() – некая точка рассматриваемого объекта, а n количество всех точек объекта.
– некая точка рассматриваемого объекта, а n количество всех точек объекта.
Для этого необходимо найти решение системы уравнений следующего вида:
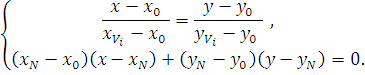
Из которого, после преобразования, получаем:

Методом Крамера рассчитываются координаты точек пересечения с проекционной прямой p.
![]()
![]()
![]()
![]()
![]()
Необходимо задать прямую р в параметрической форме, чтобы иметь возможность определять принадлежность отрезку проекции наблюдаемого объекта проекции других объектов. Пусть ![]() точка объекта,
точка объекта, ![]() определяется как точка пересечения прямой
определяется как точка пересечения прямой ![]() .
.
Среди проекций ![]() находим крайние точки, такие чтобы проекции всех других точек наблюдаемого объекта лежали внутри полученного отрезка
находим крайние точки, такие чтобы проекции всех других точек наблюдаемого объекта лежали внутри полученного отрезка ![]() , где
, где ![]() .
.
Получив крайние точки объекта возможно построить уравнение прямой р в параметрическом виде. Граничные параметры объекта будут заданы проекциями крайних точек рассматриваемого объекта на параметрическую прямую p.
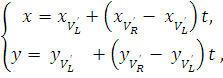
где ![]() - координаты проекции крайней левой точки L, рассматриваемого объекта, заданная с параметром прямой t=0;
- координаты проекции крайней левой точки L, рассматриваемого объекта, заданная с параметром прямой t=0; ![]() и
и ![]() - координаты проекции крайней правой точки R, рассматриваемого объекта, заданная с параметром t=1.
- координаты проекции крайней правой точки R, рассматриваемого объекта, заданная с параметром t=1.
Пусть t = pr (x,y) есть решение системы. Нетрудно видеть, что для ![]() выполняется следующее свойство
выполняется следующее свойство ![]() .
.
4. Нахождение теней остальных объектов.
Под тенью объекта будет пониматься та часть проекции на прямую р, которая лежит внутри отрезка ![]() .
.
4.1. Тенью группы объектов назовем объединение теней входящих в это множество объектов.
Тенью объекта является отрезок, который можно задавать картежом состоящего из 2 параметров ![]()
![]() ,
,
![]() .
.
Пусть имеется множество теней объектов и требуется найти тень группы этих объектов.
Построение множества теней группы объектов M. Инициализация множества теней ![]() .
.
Для каждого нового добавляемой тени ![]() необходимо выполнить следующие действия.
необходимо выполнить следующие действия.
Рассмотрим все возможные варианты пар картежей (![]() ), где
), где ![]() .
.
Возможно, шесть вариантов размещения теней относительно друг друга.
1.
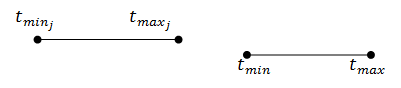
![]()
В этом случае тени не пересекаются, и следует перейти к рассмотрению следующего объекта ![]() В этом случае прерываться рассмотрение и происходит переход к следующему этапу.
В этом случае прерываться рассмотрение и происходит переход к следующему этапу.
2.
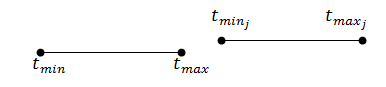
![]()
В этом случае тени также не пересекаются, и следует перейти к рассмотрению следующего объекта ![]() В этом случае прерываться рассмотрение и происходит переход к следующему этапу.
В этом случае прерываться рассмотрение и происходит переход к следующему этапу.
3.
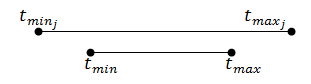
![]() и
и ![]() ,
, ![]()
В этом случае новая тень уже содержится в рассматриваемой группе теней, поэтому добавления не происходит.
4.
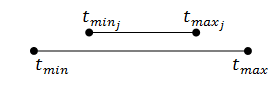
![]() и
и ![]()
В этом случае рассматривается большая тень, поэтому следует исключить тень, которая была раньше и поставить во множество М ту тень, которая включает в себя тень, находящуюся во множестве М.
![]()
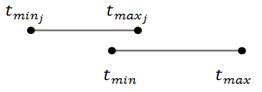 5.
5.
![]() и
и ![]()
В этом случае необходимо расширить тень влево и удалить тень, которая находилась во множестве М ранее.
![]() , j :=1.
, j :=1.
Повторить проверку элементов.
6.
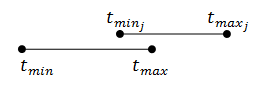
![]() и
и ![]()
В этом случае тень расширяется в право и удаляется тень, которая находилась во множестве М ранее.
![]() ,
, ![]() j: =1. Повторить проверку элементов.
j: =1. Повторить проверку элементов.
После рассмотрения всех вариантов ![]()
4.2. Длину общей тени будем определять как сумму длин не пересекающихся отрезков составляющих множество длин теней объектов.
5. Видимость объекта определяется, как выполнение следующего условия:
1 - СДТ ![]() ДПЗ, где СДТ - суммы длин теней всех объектов, которые его загораживают, ДПЗ – коэффициент допустимого закрытия объекта, значение которого определяет минимальный порог, при котором возможно сказать, что объект достаточно виден для поставленной задачи наблюдения. ДПЗ для одного типа объектов может различаться для задачи идентификации объектов и для задачи обзора объектов.
ДПЗ, где СДТ - суммы длин теней всех объектов, которые его загораживают, ДПЗ – коэффициент допустимого закрытия объекта, значение которого определяет минимальный порог, при котором возможно сказать, что объект достаточно виден для поставленной задачи наблюдения. ДПЗ для одного типа объектов может различаться для задачи идентификации объектов и для задачи обзора объектов.
В данной работе описан алгоритм расчета затенения объектов, который возможно применять для расчета видимости объектов в системах видеонаблюдения. Данный расчет проводиться в двухмерной системе координат, что позволяет увеличить скорость обработки информации. На основе полученной информации возможно построение множеств хорошо видимых объектов, фокусировка камер на которые позволит построить более точную модель видимых объектов. В которой будет возможно определить множество критериев оценки качества и стоимости предлагаемой модели видеонаблюдения.
Список литературы:
1.Белов С. В., Попов Г. А. Оценка наблюдаемости объекта защиты телекамерами на основе формирования полного набора показателей эффективности их функционирования. Датчики и системы № 5 – М: 000 “СенСиДат”, 2009 С. 39—47
2.Белов С. В., Давидюк Н. В. Общая схема решения задачи эффективного размещения средств обнаружения на объекте защиты Вестник Саратовского гос. техн. ун-та. – 2009. – № 4(43). - Вып.2. С. 113—118
дипломов