Статья опубликована в рамках: XXIII Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 12 августа 2013 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ОПТИМИЗАЦИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДОВ ОТДЕЛЬНЫХ ПРОМЫШЛЕННЫХ МЕХАНИЗМОВ
Алексеев Владислав Алексеевич
канд. техн. наук, доцент, Волжский филиал Московского автомобильно-дорожного государственного технического университета (МАДИ) г. Чебоксары
E-mail:
Артемьев Виктор Степанович
аспирант, ФГБОУ ВПО «Чувашская государственная сельскохозяйственная академия г. Чебоксары
E-mail: electricequipment@yandex.ru
DYNAMIC BEHAVIOR OPTIMIZATION OF ELECTRIC DRIVERS OF SINGLE INDUSTRIAL MECHANISMS
Vladislav Alekseev
candidate of Science, associate professor, Volga branch of The Moscow Automobile and Road Construction State Technical University (MADI), Cheboksary
Victor Artemyev
postgraduate of FSBEI HPO Chuvash State Agricultural Academy, Cheboksary
АННОТАЦИЯ
Работа содержит технические решения модернизации электроприводов унифицированных крупных серий для оптимизации работы конкретных различных производственных механизмов с целью повышения их динамических и энергетических характеристик, надежности.
ABSTRACT
The article includes universal coarse series electric drivers’ modernization technologies for optimization of different particular industrial mechanisms with the purpose of improvement of its dynamic and energetic characteristics and reliability.
Ключевые слова: электропривод, энергосбережение, динамические характеристики и надежность электропривода и оборудования
Keywords: electric driver; energy saving; dynamic behavior and reliability of electric driver and equipment.
Введение
На предприятиях большинства отраслей народного хозяйства ряд механизмов требует повышения качества регулирования скорости. Например, пилорамы, конвейеры, многие механизмы машиностроения, агропромышленного комплекса, кузнечно-прессового оборудования и волочильных (проволочных и прядевьющих в металлургии) машин требуют различные темпы изменения скорости при вращении в разные стороны, или при работе на малых и на больших скоростях.
Большинство из установленных на вышеупомянутые механизмы серийные электроприводы имеют стандартную систему регулирования с задатчиком интенсивности, настроенным на симметричную работу в обе стороны вращения с одинаковым ограничением производной скорости, то есть с постоянным динамическим моментом, во всем диапазоне регулирования скорости двигателя [5].
1. Цель: Модернизация электроприводов из унифицированных крупных серий для оптимизации работы на конкретных производственных механизмах отраслей народного хозяйства.
2. Задачи:
1) Решение технических проблем повышения быстродействия, надежности и качества регулирования отдельных производственных механизмов.
2) Решение проблемы обеспечения разного темпов переходных процессов и, соответственно, производительности целого семейства производственных механизмов с полным использованием динамических возможностей двигателей постоянного тока средней и большой мощности.
3. Реализация оригинальных технических решений
Для оптимизации динамических характеристик — повышения быстродействия и качества регулирования электроприводов авторами предложено усовершенствование системы управления автоматизированными электроприводами, приведенной на рисунке 1. Реверсивный вентильный электропривод содержит двигатель 1, подключенный к вентильному преобразователю 2. Задатчик 3 и датчик 4 скорости подключены к узлу сравнения 5 регулятора скорости (РС) 6. Выход РС 6 через последовательно соединенные нелинейное звено 7, переключатель характеристик (ПХ) 8, блок управления 9 и системы импульсно-фазового управления (СИФУ) 10 подключен к входу вентильного преобразователя 2. Второй выход нелинейного звена 7 соединен со вторым входом переключателя характеристик (ПХ) 8 через блок переключений 12, второй вход которого через датчик проводимости 13 соединен со вторым выходом вентильного преобразователя 2. Выход блока 14 токоограничения соединен с выходом регулятора скорости 6, а вход — с датчиком скорости 4. Также к датчику скорости 4 через преобразователь ЭДС 15 двигателя подключен второй вход нелинейного звена 7. Узел соответствия скорости 16 двигателя предназначен для определения соответствия скорости двигателя заданному значению скорости Он подключен к выходу узла сравнения 5 регулятора скорости 6. (Нелинейное звено 7 и преобразователь 15 ЭДС двигателя 1 образуют узел 19 линеаризации характеристик электропривода в режиме прерывистого тока.
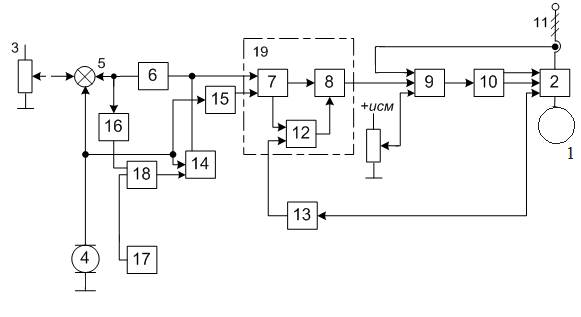
Рисунок 1. Функциональная схема управления для повышения быстродействия электропривода на малых скоростях
Выходы датчика 17 статического тока и узла соответствия скорости 16 соединены через элемент «И» 18 со вторым входом блока токоограничения 14. (Датчик 17 выдает сигнал "1" при наличии нагрузки на валу двигателя 1.)
В исходном состоянии схемы задающее напряжение равно нулю и, соответственно, двигатель 1 находится в неподвижном состоянии.
При подаче задания задатчика скорости 3 выходе вентильного преобразователя 2 появляется напряжение и двигатель 1 начинает вращаться. Направление вращения двигателя 1 определяет блок 12 в зависимости от полярности входного сигнала, снимаемого с выхода узла линеаризации 19. При достижении скорости двигателя заданной величины узел 16 соответствия скорости меняет свой выходной сигнал с "0" на "1" [6].
При работе двигателя 1 на холостом ходу при выдаче сигнала "1" датчиком статического тока 17 на выходе элемента «И» 18 сигнал "1" снижает уставку блока токоограничения 14 до номинального тока двигателя. В этом случае пульсации тока якоря двигателя, появляющиеся из-за пульсаций сигнала датчика скорости 4 и накладываемых всевозможных помех, в помещениях с мощным электрооборудованием и коммутацией электрических аппаратов, значительно ограничены. Это повышает надежность работы электропривода и предотвращает возможные ложные срабатывания, что непосредственно отразится на повышении производительности технологического оборудования.
При работе электропривода на любую статическую нагрузку датчик статического тока 17 и, соответственно, элемент «И» 18 выдают сигналы "0". Данное решение [1] нашло применение в электроприводах ряда станков с двигателями постоянного тока мощностью более 200 кВт, предусматривающих ограничение не только тока якоря, скорости и т. д., но и производной тока якоря, ускорения. Высокие значения производной тока якоря di/dt на больших скоростях для многих двигателей недопустимы, так как нарушат нормальную работу щеточно-коллекторного узла двигателя, могут привести к аварии [5].
В то же время на большинстве электроприводов механизмов производная тока якоря ограничивается постоянной величиной независимо от абсолютной величины скорости, что приводит к увеличению длительности переходных режимов на всех скоростях, т. е. к снижению быстродействия. Если в переходных режимах (пуске, реверсе и т. д.) скорость нарастания напряжения преобразователя достигает максимального значения, то нелинейный элемент ограничивает дальнейший рост сигнала на входе регулятора тока. Это ограничивает темп изменения напряжения преобразователя и, соответственно, максимальное значение производной тока якоря. Ограничение производной тока якоря (момента) двигателя в известных электроприводах производится на всех скоростях, что снижает быстродействие электропривода в переходных режимах скорости. Для повышения быстродействия электропривода в ее систему управления дополнительно введены оптрон и ключ, управляющий вывод которого соединен с выходом порогового элемента, а силовые выводы соединены с выходом датчика скорости и с входом нелинейного элемента, к выходу которого подключены анод светодиода оптрона, фоторезистор которого подключен между шиной питания и выходом сумматора.
Рисунок 2. Функциональная схема электропривода с зависимым от уровня скорости динамическим моментом
Представленный на рисунке 2 электропривод содержит электродвигатель 1 с датчиком 2 скорости, задатчик 3 и регулятор 4 скорости, сумматор 5, регулятор 6 тока якоря и преобразователь 7, подключенный к двигателю 1, датчик 8 тока якоря, пороговый элемент 9. В установившихся режимах на любых скоростях и при переходных режимах на малых скоростях двигателя n<0,25 nн, где nн — номинальная скорость двигателя, пороговый элемент 9 не срабатывает, не замыкает ключ 10. В этом случае выходное напряжение нелинейного элемента 11 равно его минимальному значению и не влияет на переходную функцию регулятора 6. В переходных режимах на больших скоростях двигателя n>0,25 nн при наличии рассогласования между заданным и истинным значениями скорости пороговый элемент 9 замыкает ключ 10 и на вход нелинейного элемента 11 поступает напряжение с датчика 2 скорости, начиная с некоторой скорости прямо пропорционально от которого изменяется выходное напряжение нелинейного элемента 11. На номинальной скорости nн — оно имеет максимальное значение, соответственно сопротивление фоторезистора 14 имеет минимальное значение, которому соответствует значение производной тока якоря, допустимое на минимальной скорости, как ограничение уровня входного сигнала регулятора 6 тока снижает и наклон переходной функции, и величину первоначального скачка (рис. 2). При достижении скоростью двигателя заданного значения пороговый элемент 9 размыкает ключ 10, выходное напряжение нелинейного элемента 11 становится равным минимальному и фоторезистор 14 принимает такую величину, которая не влияет на работу устройства, в том числе и на величину производной тока якоря. В переходных режимах на малых скоростях пороговый элемент 9 не срабатывает, ограничение выхода сумматора 5 не вступает в действие и соответственно нет ограничения динамического момента. Это обеспечивает оптимальное быстродействие, т. к. ограничение производной тока якоря вступает в действие только с той скорости, с которой наступает необходимость ее ограничения, и в зависимости от абсолютной величины скорости, что позволяет использовать двигатель лучше использовать по току и уменьшать время переходных режимов на всех скоростях. Управляющий вывод ключа 10 соединен с выходом порогового элемента 9, а силовые выводы соединены с выходом датчика 2 скорости и с входом нелинейного элемента 11, к выходу которого подключен анод светодиода 12 оптрона 13, фоторезистор 14 которого подключен между шиной питания и выходом сумматора 5 [6].
Для повышения динамических характеристик и надежности в электропривод на рисунке 3 введены компаратор 14 и цепь из резистора 15 и управляемого I ключа 16, включенная параллельно узлу 11 токоограничения. При этом вход компаратора 14 подключен к выходу датчика 13 проводимости вентилей, а выход соединен с управляющим входом ключа 16. Направление вращения электродвигателя определяет логическое переключающее устройство 12 в зависимости от полярности выходного сигнала узла 6 линеаризации, а частоту вращения определяет величина напряжения задатчика 4 скорости. Ключ 16 остается разомкнутым все время, пока преобразователь работает в режиме непрерывных токов и процесс пуска происходит с токами, допустимыми по условиям работы электродвигателя. При переходе в режим прерывистых токов ключ 16 замыкается в каждом интервале бестоковой паузы, и включение вентилей происходит с ограничением тока на уровне (0,5-1) Iном [4]. Таким образом, в электроприводе предотвращается возможность большого первого броска тока в переходных режимах. Кроме того, ограничение величины пульсаций тока электродвигателя на холостом ходу, соответственно, приводит к уменьшению потерь электроэнергии и снижает нагрев электродвигателя [7].
Рисунок 3. Функциональная схема модернизированного электропривода с ограничением динамического момента в режиме холостого хода
Данное решение позволяет повышает динамические характеристики и надежность электропривода, исключает динамические удары на механизм, повышая надежность его работы, снижая срок ремонтных работ и уменьшая эксплуатационные расходы механизмов.
4. Практическая ценность и научная новизна
Для повышения надежности при работе электропривода на высоких скоростях выдержка времени бестоковой паузы увеличивается подключением датчика скорости к дополнительному входу элемента выдержки времени логического переключающего устройства для реверсивного управляемого выпрямителя через нелинейное звено с зоной нечувствительности [4]. Благодаря такому оригинальному решению при возрастании скорости (ЭДС) двигателя свыше 0,8 номинального значения величина бестоковой паузы увеличивается скачком. При уменьшении скорости ниже 0,8 номинального значения величина бестоковой паузы снижается скачком до величины, достаточной для обеспечения надежной работы электропривода.
5. Экономическая эффективность внедрения
Даже разовый простой, вызванный остановом оборудования, а чаще это всей технологической цепи производства, приводит к огромным издержкам и ущербу, который металлургии или в коммунальных технологиях исчисляется миллионами рублей.
6. Выводы
Использование приведенных технических решений на предприятиях большинства отраслей народного хозяйства повышает надежность, динамические характеристики и качество регулирования скорости электроприводов целого ряда производственных механизмов предприятий, позволяет сэкономить электроэнергию и повысить надежность работы электроприводов и самих механизмов, и, соответственно, производительность работы производств на предприятиях металлургии (главных и вспомогательных механизмов- ножниц, моталок), горнорудной промышленности (конвейеров, подъемных установок и прессов), в конечном итоге конкурентоспособность.
Список литературы
1.Алексеев В.А. Логическое переключающее устройство для реверсивного выпрямителя. Авт. свид. № 1422322. БИ № 33, 1988 г.
2.Алексеев В.А. Реверсивный вентильный электропривод. Авт. свид. № 1536499. БИ № 2, 1990 г.
3.Алексеев В.А., Иванов А.Г. Электропривод постоянного тока. Авт. свид. № 989723. БИ № 2, 1983 г.
4.Алексеев В.А., Чернышев А.С. Реверсивный вентильный электропривод. Авт. свид. № 1427535. БИ № 36, 1988 г.
5.Кестер У., Мир электроники. Аналого-цифровое преобразование/ Редактор оригинального издания Уолт Кестер. Перевод с англ. под ред. Е.Б. Володина. М.: «Техносфера», 2007 г. — 1015 с.
6.Мазунин В.П. Быстродействующие регулируемые электроприводы. Прикладная оптимизация и технические решения/В.П. Мазунин; Рос. акад. наук. Уральское отд-ние. Институт машиноведения. Екатеринбург: УрО РАН, 1999. — 297 с.: илл.
7.Панкратов В.В. Автоматическое управление электроприводами. Часть 1. Регулирование координат электроприводов постоянного тока: учеб. пособие/ В.В. Панкратов. Новосибирск: Изд-во НГТУ, 2013. — 215 с.
дипломов