
Статья опубликована в рамках: LIII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 23 декабря 2015 г.)
Наука: Технические науки
Секция: Приборостроение, метрология, радиотехника
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ПРИВОД ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ ТОЧКИ ВЫВЕСКИ СИСТЕМЫ ОБЕЗВЕШИВАНИЯ
Ча Григорий Олегович
магистрант,
Новосибирский Государственный Технический Университет,
РФ, г. Новосибирск,
конструктор,
Конструкторско-технологический Институт Научного Приборостроения СО РАН,
РФ, г. Новосибирск
E -mail: Grigoriy_olegovich@mail.ru
Скоков Дмитрий Владимирович
начальник конструкторского отдела,
Конструкторско-технологический Институт Научного Приборостроения СО РАН,
РФ, г. Новосибирск
Скиба Вадим Юрьевич
канд. техн. наук, доцент,
Новосибирский Государственный Технический Университет,
РФ, г. Новосибирск
Глейм Виктор Робертович
магистрант,
Новосибирский Государственный Технический Университет,
РФ, г. Новосибирск
Левчук Алексей Юрьевич
магистрант,
Новосибирский Государственный Технический Университет,
РФ, г. Новосибирск
Плотников Кирилл Павлович
магистрант,
Новосибирский Государственный Технический Университет,
РФ, г. Новосибирск
WEIGHT POINT’S VERTICAL MOVEMENT DRIVE OF ZERO GRAVITY SYSTEM
Cha Grigoriy
undergraduate, Novosibirsk State Technical University, Novosibirsk.
designer , Technological Design Institute of Scientific Instrument Engineering,
Russia, Novosibirsk
Skokov Dmitry
Head of Design Department,
Technological Design Institute of Scientific Instrument Engineering,
Russia, Novosibirsk
Skeeba Vadim
candidate of Science, assistant professor,
Novosibirsk State Technical University,
Russia, Novosibirsk
Gleym Victor
undergraduate,
Novosibirsk State Technical University,
Russia, Novosibirsk
Levchuk Aleksey
undergraduate,
Novosibirsk State Technical University,
Russia, Novosibirsk
Plotnikov Kirill
undergraduate,
Novosibirsk State Technical University,
Russia, Novosibirsk
АННОТАЦИЯ
Для созданий условий имитации отсутствия силы тяжести (обезвешивания) при раскрытии механических устройств батарей солнечных (далее – МУ БС), необходим привод вертикального перемещения точки вывески системы обезвешивания автоматизированной активной (далее – СОА).
В 2014 году в КТИ НП СО РАН разработан привод вертикального перемещения точки вывески системы обезвешивания в составе СОА. В настоящее СОА изготавливается в опытном производстве КТИ НП СО РАН.
Принцип действия привода заключается в перемещении точки вывески по сигналу управляющей программы.
ABSTRACT
For creating the conditions to simulate the zero gravity during the disclosure of the mechanical devices of solar panels weighting point's vertical movement drive for an active automated zero gravity system is required.
In 2014 Technological Design Institute of Scientific Instrument Engineering (TDI SIE) Siberian Branch RAS developed the weighting point's vertical movement drive for an active automated zero gravity system as part of this automated system. At the present time automated system of zero gravity is produced in the pilot plant of TDI SIE.
The operating principle of the drive is to move the weighting point by the signal of the control program.
Ключевые слова : приборостроение; привод; система обезвешивания.
Keywords: instrumentation; the zero gravity system; drive
Введение
В отрасли космического приборостроения для проведения испытаний работы подвижных конструкций систем космических аппаратов используют специальные устройства, называемые системами обезвешивания [2; 4–6].
СОА предназначена для создания условий имитации отсутствия силы тяжести (обезвешивания) при раскрытии МУ БС. СОА должна обеспечивать обезвешивание МУ БС в автоматическом режиме с заданной точностью в момент её трансформации (раскрытия из транспортного положения в рабочее), с максимальной компенсацией влияния собственной массы МУ БС на работу её механических узлов и минимизацией влияния на результаты испытаний присоединённой массы СОА для МУ БС.
Описание конструкции
Способ обезвешивания состоит в том, что крыло МУ БС в транспортном положении закрепляется на имитаторе корпуса космического аппарата, а панели МУ БС подвешиваются на тросы за центры масс конструкции в 12-ти точках вывески. Каждая точка вывески имеет отдельный привод вертикального, продольного и горизонтального перемещения, с которым осуществляется обратная связь с помощью датчика силы вывески и блока определения рассогласования координат. В ходе раскрытия датчик силы определяет натяжение троса и посылает сигнал в контроллер, установленный в щите автоматики. В случае изменения натяжения троса контроллер управляет серводвигателем для компенсации изменения натяжения. При раскрытии конструкции отклонение троса от вертикали фиксируется блоком определения рассогласования координат (специальными оптическими датчиками), которые, в свою очередь, передают сигнал на серводвигатели и отклонение компенсируется.
Привод вертикального перемещения точки вывески обезвешивания двигается поперечно по рельсовым профильным направляющим продольной каретки, которая совершает движение вдоль основания, за счет приводов продольного и поперечного перемещения, состоящими из серводвигателей, редукторов и зубчатых шкивов, обкатывающих зубчатые ремни, натянутые по направлению движения. Продольный и поперечный ход ограничивается концевыми выключателями.
Привод сконструирован таким образом, что при отказе датчиков, ограничивающих вертикальный ход, исключается аварийная ситуация, приводящая к поломке МУ БС и нарушению работоспособности системы.
На рис. 1 изображена кинематическая схема разработанного изделия: трос диаметром 3 мм с точкой вывески укладывается на шпулю диаметром 80 мм в один слой гайкой-укладчиком. Используется передача винт-гайка, шаг резьбы винта равен диаметру троса, поступательным движением гайки-укладчика согласованы с оборотами вала со шпулей посредством цилиндрической зубчатой передачи 60-60. Таким образом, при перемещении точки вывески на 2500 мм от нулевой точки, шпуля совершит 10 оборотов, гайка-укладчик пройдет путь в 30 мм, перекроет луч датчика, произойдет остановка двигателя. В случае отказа датчиков гайка пройдет путь в 31,5 мм и достигнет механического упора.
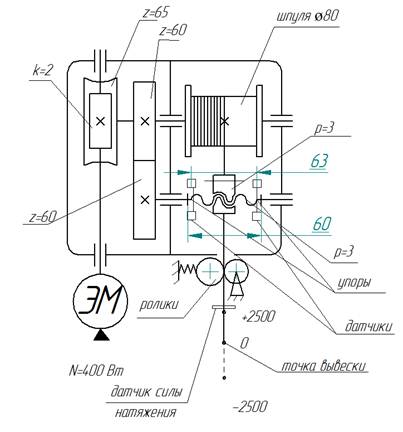
Рисунок 1. Кинематическая схема привода системы вертикального перемещения точки вывески обезвешивания
Момент на двигателе возрастет и произойдет его остановка. Во избежание перемещения объекта обезвешивания при воздействии каких-либо внешних нагрузок установки двигатель и шпуля согласованы посредством червячной передачи, обладающей свойством самоторможения.
Выбор диаметра и ширины шпули [1; 3]:
![]() (1)
(1)
где: n – количество оборотов шпули,
L – вертикальный ход точки вывески,
D – диаметр шпули.
![]() (2)
(2)
Принимаем n=20 оборотов.
![]() (3)
(3)
Принимаем D=80 мм. Тогда минимальная ширина m шпули:
![]() (4)
(4)
![]() (5)
(5)
где: d – диаметр троса,
b – толщина укладчика.
Таким образом, выставляем датчики ограничения вертикального хода на расстоянии 60+b мм, а упоры для гайки-укладчика на расстоянии 63+b мм (во избежание обрыва троса добавляем по 1,5 мм на сторону, что равно половине оборота шпули). На рис. 2 представлена кинематическая схема привода в крайних положениях.
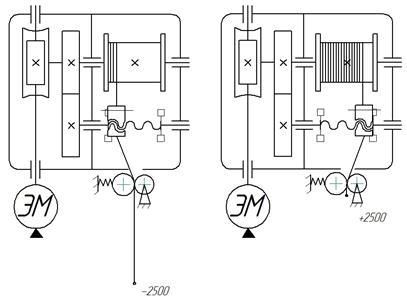
Рисунок 2. Крайние положения точки вывески.
Вывод
Привод вертикального перемещения системы автоматизированной активной является надёжным и был разработан таким образом, что вертикальный ход точки вывески ограничивается не только оптическими датчиками, но и упорами, что практически исключает механическую поломку как БС, так и элементов привода системы. Червячная передача, обладающая условием самоторможения, позволяет точкам вывески перемещаться только за счет двигателя, что исключает вероятность движения объекта обезвешивания под воздействием сил тяжести или внешней нагрузки при возникновении аварийной ситуации (отключении электричества), однако усложняется конструкция и увеличивается вес привода.
Список литературы:
1. Иванов М.Н. Детали машин: учебник для высших технических учебных заведений / М.Н. Иванов, В.А. Финогенов. – М., 2008. – 408 с.
2. Камалов В.С. Производство космических аппаратов. – М.: Машиностроение – 1982. – 280 с.
3. Курсовое проектирование деталей машин: учебное пособие для машиностроит. спец. техникумов / [авторы: С.А. Чернавский, К.Н. Боков, И.М. Чернин и др. ; ред. С.А. Чернавский]. – М., 1988. – 416 с.
4. Кучина Ю.В., Круглов П.В. 77-48211/625361 Разработка конструкции стенда трёхосного обезвешивания малого космического аппарата для наземной экспериментальной отработки системы ориентации и стабилизации // Инженерный вестник. – 2013. – № 10. – С. 14–14.
5. Скиба В.Ю. Актуальные проблемы в машиностроении: сборник материалов первой международной научно-практической конференции // Хроники объединенного фонда электронных ресурсов Наука и образование. – 2014. – № 11 (66). – С. 83.
6. Экспериментальные исследования элементов космических конструкций / В.Н. Зимин, И.М. Колосков, В.Е. Мешковский, Л.П. Таирова, С.А. Чурилин // Инженерный журнал: наука и инновации, 2013, вып. 3. [Электронный ресурс] – Режим доступа. – URL: http://engjournal.ru/catalog/machin/rocket/617.html (дата обращения 11.10.2014).
7. Экспериментальная отработка космических летальных аппаратов / В.А. Афанасьев, В.С. Барсуков, М.Я. Гофин и др. Под редакцией Н.В. Холодкова. – М.: Изд-во МАИ, 1994. – 412 с.
8. Actual Problems and Decisions in Machine Building / ed. by V.Yu. Skeeba. –Pfaffikon: Trans Tech Publ. – 2015. – 344 p. – (Applied mechanics and materials; vol. 788). - ISBN 978-3-03835-551-9.
дипломов
Оставить комментарий