Статья опубликована в рамках: XXXIV Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 30 июня 2014 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
О ВЛИЯНИИ ВЗАИМОСВЯЗЕЙ В МНОГОМЕРНОМ ИНТЕРВАЛЬНО-ЛОГИЧЕСКОМ РЕГУЛЯТОРЕ
Антипин Андрей Федорович
канд. техн. наук, доцент Стерлитамакского филиала Башкирского государственного университета, РФ, г. Стерлитамак
E-mail:
INFLUENCE OF INTERLINKAGES IN MULTIDIMENSIONAL INTERVAL-LOGIC CONTROLLER
Andrey Antipin
candidate of Science, assistant professor of Sterlitamak branch of Bashkir State University, Russia, Sterlitamak
Работа выполнена при поддержке гранта СФ БашГУ № В14-2.
АННОТАЦИЯ
Рассматриваются особенности взаимосвязей параметров в многомерном нечётком интервально-логическом регуляторе и степень их влияния на анализ программного кода автоматизированных систем управления на его основе.
ABSTRACT
Discussed the features of the interlinkages of parameters in multidimensional interval-logic controllers and the degree of influence on the analysis of the program code of automated control systems based on it.
Ключевые слова: нечеткая логика; многомерный интервально-логический регулятор; автоматизированная система управления.
Keywords: fuzzy logic; а multidimensional interval-logic controller; automated control systems.
В настоящее время, в условиях стремительно возрастающей сложности автоматизированных систем управления (АСУ) технологическими процессами актуальными становятся вопросы разработки и создания качественно новых методов и средств верификации их программного кода. Что было действенным еще десятилетие назад (в частности, тестирование и отладка), сегодня не дает 100 % гарантии их безошибочной работы. Все это происходит из-за того, что процесс пуска-наладки АСУ достаточно дорогостоящий, осуществляется, как правило, иностранными специалистами (итальянцами, немцами, французами и пр.) и, как следствие, достаточно сильно ограничен по времени.
В связи с вышесказанным автором предлагается использовать в качестве дополнительного средства верификации программ инструменты для анализа, имеющиеся в разработанном им программном обеспечении «САПР МИЛР», скриншоты которого представлены на рис. 1, 2 [1], где МИЛР — многомерный нечеткий интервально-логический регулятор [2], который представляет собой разновидность нечетких регуляторов; САПР — система автоматизированного проектирования.
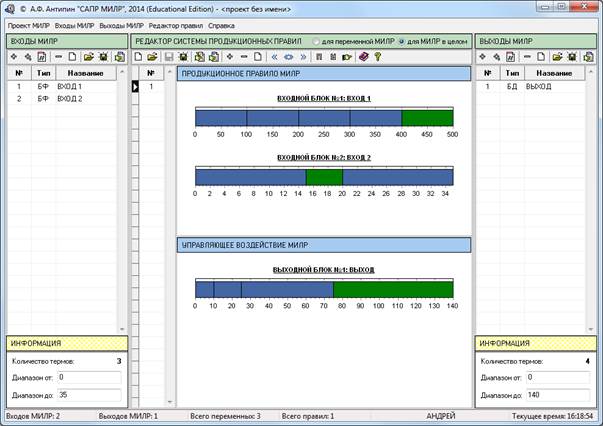
Рисунок 1. Скриншот системы для разработки и анализа МИЛР
Так как работа МИЛР сильно приближена к действиям человека-эксперта (или оператора-технолога на производстве), при разработке АСУ на их основе учитываются взаимные связи параметров, обратная связь и степень влияния их друг на друга.
В многомерных регуляторах между всеми параметрами существует 3 вида функциональных связей: математические fм, логические fл и комбинированные fк, которые объединяют в себе предыдущие 2 вида.
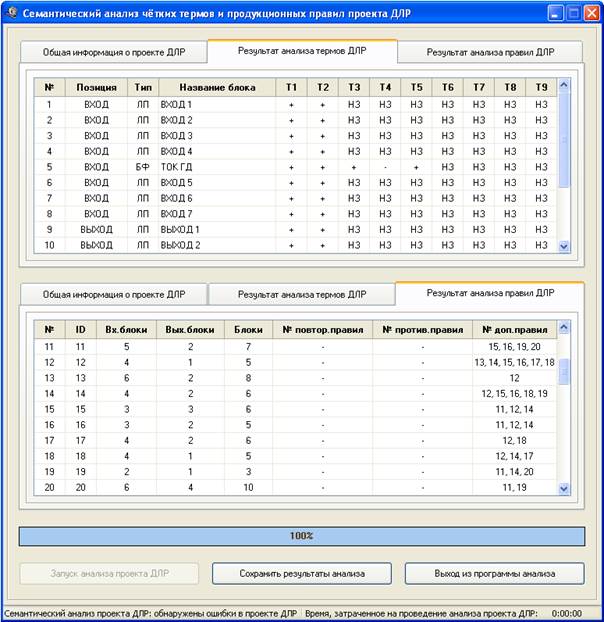
Рисунок 2. Скриншот «САПР МИЛР» с результатами анализа
МИЛР отличителен от остальных логических регуляторов тем, что в нем функции fм реализованы в т. н. блоках деинтервализации, осуществляющих выдачу требуемого значения непрерывной физической величины из интервала, входящего в диапазон значений данной величины [1, 2].
Максимальное число продукционных правил R МИЛР можно вычислить по формуле:
![]()
где K(X1), (X2), …, (Xn) — число разнообразных интервалов (термов) или значений, которые могут принимать переменные X1, X2, …, Xn, анализируемые в антецедентах продукционных правил.
Если взаимосвязей между параметрами не существует, то выражение для расчета R примет вид:
![]()
Рассмотрим пример. В МИЛР задействовано 3 входных параметра — x1, x2 и x3, интерпретированные тремя термами каждый, и 2 выходных параметра — y1 и y2. Значения x1 и x2 влияют на значение y1, а x2 и x3 — на значение y2. В данном случае суммарное число продукционных правил R МИЛР лежит в диапазоне [9; c. 27], согласно приведенным выше выражениям. Взаимосвязи параметров МИЛР отражены на рис. 3, а).

Рисунок 3. Пример взаимосвязей в МИЛР: а) без поглощения, б) с поглощением продукционных правил
Здесь анализируемые входы одних выходных параметров не перекрывают входы других выходных параметров МИЛР, как в случае, представленном на рис. 2, б), где система продукционных правил для y1 включает в себя правила для y2. Данное явление называется поглощением.
Можно выделить т. н. уровни связности входных и выходных параметров МИЛР в зависимости от того с каким числом выходных и входных параметров соответственно они связаны. Это способствует гибкой настройке взаимосвязей параметров внутри программы МИЛР и, как следствие, более точному анализу семантики кода.
Процент снижения максимального числа продукционных правил ∆R лежит в диапазоне [0; ∆Rmax], где ∆Rmax может быть рассчитан согласно следующему выражению

Таким образом, количество взаимосвязей параметров напрямую влияет на производительность МИЛР и сложность АСУ в целом.
Список литературы:
1.Антипин А.Ф. Об одном способе анализа структуры многомерного чёткого логического регулятора // Прикладная информатика. — 2012. — № 5. — С. 30—36.
2.Антипин А.Ф. Системы управления технологическими процессами на базе многомерных логических регуляторов // Автоматизация и современные технологии. — 2014. — № 1. — С. 12—18.
дипломов
Оставить комментарий